照片礼貌Trendmasters
轰鸣的机器人是最受欢迎的玩具在2001年一上架。虽然没有革命性的机械参与他们的设计,他们结合几种常见的技术创新的方式。这些玩具是他们的主要困境游戏元素:玩家收集特殊卡片激活不同的战斗行动,提高机器人的力量水平。
广告
在这个版本的18新利最新登入HowStuffWorks,我们将看看隆隆声机器人的各种组件的工作。您将看到,基本元素的隆隆声机器人仅仅是常见的电子设备的修改版本我们每天使用。
轰鸣的机器人是最受欢迎的玩具在2001年一上架。虽然没有革命性的机械参与他们的设计,他们结合几种常见的技术创新的方式。这些玩具是他们的主要困境游戏元素:玩家收集特殊卡片激活不同的战斗行动,提高机器人的力量水平。
广告
在这个版本的18新利最新登入HowStuffWorks,我们将看看隆隆声机器人的各种组件的工作。您将看到,基本元素的隆隆声机器人仅仅是常见的电子设备的修改版本我们每天使用。

遥控玩具大多是由一个操作无线电发射机。移动控件时,发射机发送无线电信号,在一个特定的频率,一个无线电接收器内的玩具。无线电信号包括一组独特的电磁脉冲,代表一个特定的命令。玩具识别此命令并携带出来。(见18新利最新登入无线电控制的玩具是如何工作的详情)。
隆隆声机器人操作一个相似的系统,但是他们使用红外线而不是无线电波。红外遥控器就像一个迷你型莫尔斯电码灯。它传递信息通过闪烁的小发光二极管(LED)在一个独特的长闪光和短闪光模式。发出的红外线LED是我们的眼睛看不见,但不是机器人的感光面板。传感器拾取信号和理解信息。
广告

这是标准中使用的同样的原则电视遥控器。事实上,轰鸣的机器人控制器看起来很像一个电视遥控器。塑料控制器房价包含:
隆隆声机器人(以及其他现代电子产品)使用印刷电路板。印刷电路板是一块薄的玻璃纤维与薄铜“线”在其表面蚀刻。这些电线连接电源组件在一个复杂的电路。
电路板的隆隆声机器人控制器包括:
当你移动控制器上的塑料垫,他们压低在电路板上的按钮。按钮只是块橡胶导电板。按下按钮将导电金属块电路板上的接触点。通常,每一个接触点是一个开放部分电池之间的电路和集成电路。换句话说,蚀刻线没有连接,所以电流不能流向微芯片。按导电板的连接关闭电路,电流流经板从一线,和移动芯片。

按钮是抑郁的集成电路整理,生成一个适当的命令信号并将其传递到一个晶体管。晶体管放大信号,激活了红外线。控制器将发出的信号,只要按钮是沮丧。
在下一节中,我们将看看会发生什么当这个信号达到机器人的光传感器。
广告

在上一节我们看到,隆隆声机器人控制器通过红外线传输命令。每个控制器都有一个设置和设置。当您设置之间切换时,芯片的变化闪光模式的红外信号。
机器人有A和B的设置。当您切换机器人从A到B,它将忽略模式信号,但将注册B模式的信号。如果你有两个相同的机器人模型,您必须设置一个在B和一个在a。否则,一个控制器将激活。不同的模型使用不同的模式,使战斗更容易。
广告
红外探测器的核心是一个小的光电管电子组件响应光。光电池是一个广泛的应用光电效应电子的发射,某些材料针对特定频率的光。
典型的光电管由感光半导体层,夹在两个电极之间。电池发送一个恒定的电流在两个电极,光电池是否暴露于光线。当你公开光电管合适的光线,增加电子放大了整个电子流动的电流。如果光闪烁,当前将增加和减少了同样的模式。通过这种方式,一个光电管将光信号转换成电信号(见18新利最新登入太阳能电池的工作原理更多关于这个过程)。

电信号通过机器人的中央集成电路。基于这个信号的数字模式,集成电路执行某些操作,如前进、转弯或扔一拳。在下一节中,我们将看看组件参与这些行动。
广告

就像一个无线遥控车,隆隆声机器人有四个轮子,这是由电动马达。在下图中可以看到,隆隆声机器人有两个驱动电机,这一系列的旋转齿轮移动机器人的轮子。这些汽车是安置在底部一半的机器人。
当集成电路接收到适当的信号,它发送一个电流的一个或两个发动机。每个电机可以在两个方向旋转,这取决于电流的方向。(见18新利最新登入电动机的工作原理详情)。
广告
通过扭转当前的流向电机、集成电路可以改变机器人的方向。如果两台发动机都接受积极的当前,所有车轮将自旋相同的方式,机器人将前进。如果两个接收负电流,机器人将会落后。如果一个马达收到积极的电流,另一个接收负电流,每一侧的车轮将在相反的方向旋转,将和机器人。如果电流切换为汽车、机器人将在相反的方向。
机器人有三分之一在其头部运动,手臂来回移动。在下图中可以看到,这包括两个冲机制齿条和小齿轮齿轮。中央齿轮马达转动,将一个移动架的连接装置。
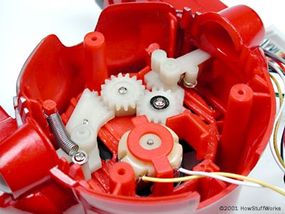
在这个设计中,每个齿轮的基础上取得双方;也就是说,它有两个部分牙齿隔开两个光滑的部分。牙齿与牙齿接触部分货架,附在机器人的手臂。牙齿是订婚时,齿轮将滑架(手臂)落后。当齿轮围绕平滑部分,它释放架。搁板弹簧,所以他们在释放向前冲。
这是特定的机制在“车轮螺母。”Other Rumble Robots have different punching styles, with different gear arrangements, but the basic elements are fairly similar.
隆隆声机器人比赛的目的是让你的机器人土地有效打击对手的机器人。在下一节中,我们将看到如何隆隆声机器人注册这些打击。18新利最新登入
广告

在隆隆声机器人比赛中,对象是评分点击对方机器人。有三种方式得分达到:

使用激光,使冲压机制或增加机器人的力量,玩家必须收集正确的卡片。在下一节中,我们将看到如何隆隆声机器人读这些卡片。18新利最新登入
广告
广告

最主要的,集隆隆声机器人除了其他遥控玩具力量卡片。每个隆隆声机器人带有一组力量卡片,和额外的卡片在单独的包是可用的。
通过滑动卡的正确序列在机器人的头槽,玩家可以激活机器人的激光防御,冲孔机构,速度和力量点。
广告
每个隆隆声机器人有一个名片扫描仪槽的。
读卡器就像一个工作条形码在一个杂货店扫描仪。它有一个微小的光位置旁边一个微小的传感器。每个卡都有一个独特的黑白线模式。当你滑动卡槽,光束通过线模式。光的白线反映了许多传感器,但黑色线条吸收大部分的光(见18新利最新登入光线是如何工作的找出为什么发生这种情况)。
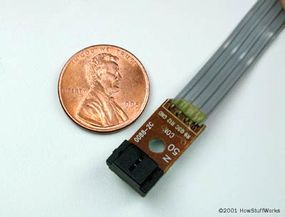
就像红外探测器光电管、扫描仪传感器光模式转换为电子信号。机器人的集成电路读取这个信号,使新的移动或增加机器人的功率。当机器人被击败,或停电,集成电路复位。它必须“学习”的举措。
随着轰鸣的流行的机器人,我们肯定会看到许多类似的战斗在未来玩具。像隆隆声机器人,这些玩具将结合一个标准与主机遥控系统的互动功能。更多地了解隆隆声机器人和类似的机器,查看下一个页面上的链接。
广告
请复制/粘贴以下文本正确引用HowStuffWorks.com的这篇文章:18新利最新登入
广告