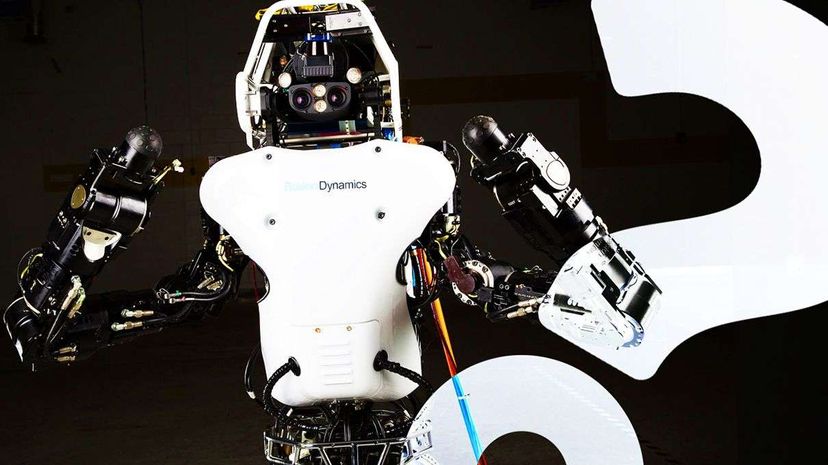
在阿特拉斯的新画面,波士顿动力公司所做的不仅仅是恼人的机器人:他们证明掌握一些最在机器人的棘手问题。
保持平衡对人类的两足动物并不总是容易。(詹妮弗·劳伦斯,如果你读这篇文章的时候,我们感觉你。)尽管我们有一个复杂的,内置的系统来帮助我们。压敏在我们的皮肤神经,肌肉和关节告诉我们的坚定和斜率。在我们的内耳,运河充满液体和细毛给我们详细的细微差别关于我们三维空间方位和运动。我们的眼睛吸收大量数据的形状和周围物体的距离。
广告
编程这些传感器成两条腿的机器,然后让计算机处理数据和推断适当运动实时提示是庞大的壮举。其他设计更稳定:四条腿,车轮和履带击败两足动物机器人的实用性。
为什么尝试呢?波士顿动力公司只是炫耀吗?18新利最新登入好吧,也许。但大多数我们的世界是建立在假设人打交道会有大小、形状和一般人的能力。我们甚至不方便我们的同类绕过如果身体或狭窄的能力超出规范,我们绝对没有考虑机器人的需求在构建我们的空间。
对于任何小,专业的机器人将来你可能会购买,这件事可能不会太多。它将常规任务。但是,正如上面的视频讨论,它变成了一个巨大的问题如果我们要追求的最大目标之一在机器人:机器人发送到救灾场景。有很多情况下,如福岛危机,人类的反应不能生存,不应该被要求。毕竟,我们生活在一个令人难以置信的未来,这是一个人的真正的工作惹一个机器人。它会让你觉得一切皆有可能,只要有足够的重活和伺服耦合器。
广告