正如电脑彻底改变了20世纪下半叶,机器人领域同样有潜力改变我们生活在21世纪。18新利最新登入我们已经看到了18新利最新登入机器人已经改变了制造业的汽车和其他消费品通过简化和加快生产线。我们甚至有机器人割草机和机器人宠物。和机器人使我们看到,人类还不能够访问的地方,如其他行星和海洋的深处。
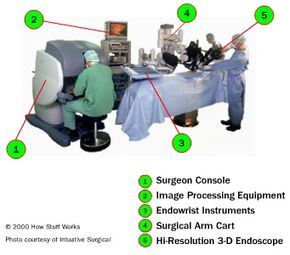
在未来的几十年里,我们可以看到有人工智能的机器人。有些国家,如本田阿西莫机器人,将类似人类形态。他们最终可能成为自我意识和意识,能够一个人可以做任何事。当我们谈论机器人做人类的任务,我们经常谈论未来,但机器人手术已经成为现实。全世界的医生都使用复杂的机器人执行手术的病人。
广告
并不是所有的手术机器人是相等的。有三种不同的机器人手术系统:supervisory-controlled系统,telesurgical系统和共享控制系统。每个系统之间的主要区别是涉及人类外科医生必须在执行外科手术。18新利最新登入一端的频谱,机器人执行外科技术没有一个外科医生的直接干预。另一方面,医生进行手术机器人的协助下,但医生做的大部分工作(资料来源:布朗大学)。
而机器人手术系统仍相对少见,在世界各地的几家医院买了机器人手术系统。这些系统有潜力提高手术的安全性和有效性。但系统也有一些缺点。这仍然是一个相对年轻的科学,它是非常昂贵的。有些医院可能会阻碍采用技术。
为什么一个医院考虑机器人手术系统呢?在下一节中找到。
广告